
ROSを使用したソフトウェア開発のお仕事をさせていただきました。
ROSとは?
Robot Operating Systemの略で、ロボット用のソフトウェアのプラットフォームです。OSと名前がついているので、WindowsやLinuxなどと勘違いしてしまいますが、既存のOS上で動くミドルウェアになります。
https://ja.wikipedia.org/wiki/Robot_Operating_System
どんなことができるか?
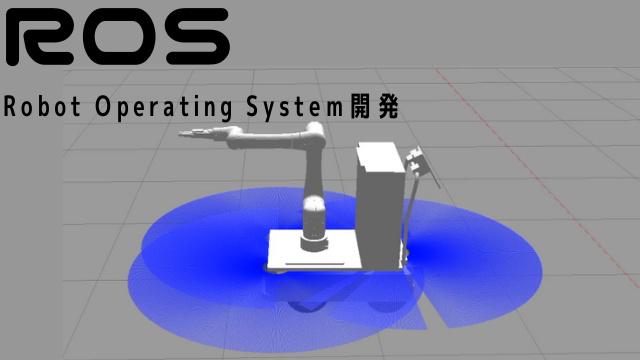
これはGazebo上でシミュレーションモデルを動かした動画です。
青い円は障害物を認識するLiDARセンサーです。実機を動かさず、問題がないか検証が可能になります。
今回のお仕事の概要
筑波にある国立研究開発法人 産業技術総合研究様で単腕移動ロボットの開発を行っており、そちらのシミュレーター開発、3Dモデルの作成を行わせていただきました。
開発の背景
少子高齢化による労働人口の減少傾向に加え、近年の感染症疾病による社会活動の制限状況において、テレワークなど労働環境の変化への技術的対応が求められています。
産業技術総合研究様では、人と協調する人工知能(AI)、ロボット、センサ等を融合したサイバーフィジカルシステムにより、全ての産業分野で労働生産性を向上させ、また、技能の継承・高度化に資する基盤技術を開発し普及させることを最終目的とした研究がされています。
その中で、人・機械協調の新しい労働環境における安全性を確保するための技術開発のお手伝いをさせていただきました。
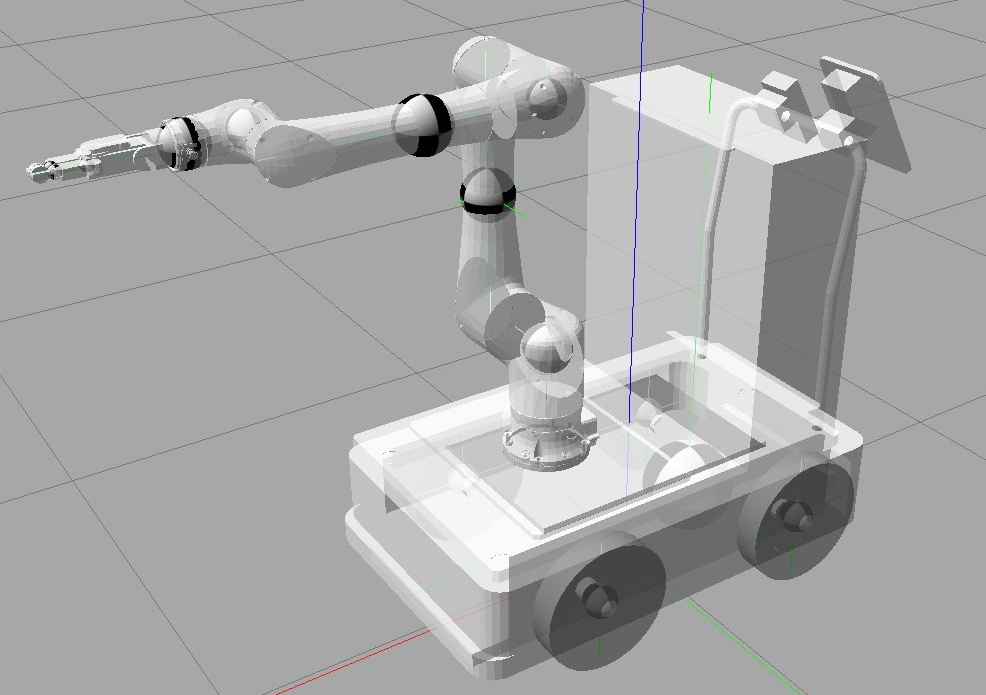
単腕移動ロボット
今回は、走行ロボットと協働ロボット FANUC社製 CRX-10iA、ハンドはOnRobot社製 RG2-FTを組み合わせたものでした。
長野県茅野市にある株式会社ミルデザイン様と一緒にやらせていただきました。OnRobotの正規代理店です。
https://www.milldesign.co/
Arcana製作所では、ROS開発も行っております。3Dスキャンに限らずシミュレーション用の3Dモデル作成も可能です。何かお困りごとがありましたらお気軽にお問い合わせくださいませ。